使用指南¶
本文档介绍如何使用 PaddleScience 中的常用基础功能和进阶功能,基础功能包括断点继续训练、迁移学习、模型评估、模型推理;进阶功能包括分布式训练(暂时只支持数据并行)、混合精度训练、梯度累加。
1. 基础功能¶
1.1 使用 YAML + hydra¶
PaddleScience 推荐使用 YAML 文件控制程序训练、评估、推理等过程。其主要原理是利用 hydra 配置管理工具,从 *.yaml 格式的文件中解析配置参数,并传递给运行代码,以对程序运行时所使用的超参数等字段进行灵活配置,提高实验效率。本章节主要介绍 hydra 配置管理工具的基本使用方法。
在使用 hydra 配置运行参数前,请先执行以下命令检查是否已安装 hydra。
如未安装,则需执行以下命令安装 hydra。
1.1.1 打印运行配置¶
Warning
注意本教程内的打印运行配置方法只作为调试使用,hydra 默认在打印完配置后会立即结束程序。因此在正常运行程序时请勿加上 -c job 参数。
以 bracket 案例为例,其正常运行命令为:python bracket.py。若在其运行命令末尾加上 -c job,则可以打印出从运行配置文件 conf/bracket.yaml 中解析出的配置参数,如下所示。
mode: train
seed: 2023
output_dir: ${hydra:run.dir}
log_freq: 20
NU: 0.3
E: 100000000000.0
...
...
EVAL:
pretrained_model_path: null
eval_during_train: true
eval_with_no_grad: true
batch_size:
sup_validator: 128
1.1.2 命令行方式配置参数¶
仍然以配置文件 bracket.yaml 为例,关于学习率部分的参数配置如下所示。
...
TRAIN:
epochs: 2000
iters_per_epoch: 1000
save_freq: 20
eval_during_train: true
eval_freq: 20
lr_scheduler:
epochs: ${TRAIN.epochs} # (1)
iters_per_epoch: ${TRAIN.iters_per_epoch}
learning_rate: 0.001
gamma: 0.95
decay_steps: 15000
by_epoch: false
...
${...}$是 omegaconf 的引用语法,可以引用配置文件中其他位置上的参数,避免同时维护多个相同语义的参数副本,其效果与 yaml 的 anchor 语法类似。
可以看到上述配置文件中的学习率为 0.001,若需修改学习率为 0.002 以运行新的实验,则有以下两种方式:
- 将上述配置文件中的
learning_rate: 0.001改为learning_rate: 0.002,然后再运行程序。这种方式虽然简单,但在实验较多时容易造成实验混乱,因此不推荐使用。 -
通过命令行参数的方式进行修改,如下所示。
这种方式通过命令行参数临时重载运行配置,而不会对
bracket.yaml文件本身进行修改,能灵活地控制运行时的配置,保证不同实验之间互不干扰。
1.1.3 自动化运行实验¶
如 1.1.2 命令行方式配置参数 所述,可以通过在程序执行命令的末尾加上合适的参数来控制多组实验的运行配置,接下来以自动化执行四组实验为例,介绍如何利用 hydra 的 multirun 功能,实现该目的。
假设这四组实验围绕随机种子 seed 和训练轮数 epochs 进行配置,组合如下:
| 实验编号 | seed | epochs |
|---|---|---|
| 1 | 42 | 10 |
| 2 | 42 | 20 |
| 3 | 1024 | 10 |
| 4 | 1024 | 20 |
执行如下命令即可按顺序自动运行这 4 组实验。
[HYDRA] Launching 4 jobs locally
[HYDRA] #0 : seed=42 TRAIN.epochs=10
....
[HYDRA] #1 : seed=42 TRAIN.epochs=20
...
[HYDRA] #2 : seed=1024 TRAIN.epochs=10
...
[HYDRA] #3 : seed=1024 TRAIN.epochs=20
...
多组实验各自的参数文件、日志文件则保存在以不同参数组合为名称的子文件夹中,如下所示。
PaddleScience/examples/bracket/outputs_bracket/
└──2023-10-14 # (1)
└── 04-01-52 # (2)
├── TRAIN.epochs=10,20,seed=42,1024 # multirun 总配置保存目录
│ └── multirun.yaml # multirun 配置文件 (3)
├── TRAIN.epochs=10,seed=1024 # 实验编号3的保存目录
│ ├── checkpoints
│ │ ├── latest.pdeqn
│ │ ├── latest.pdopt
│ │ ├── latest.pdparams
│ │ └── latest.pdstates
│ ├── train.log
│ └── visual
│ └── epoch_0
│ └── result_u_v_w_sigmas.vtu
├── TRAIN.epochs=10,seed=42 # 实验编号1的保存目录
│ ├── checkpoints
│ │ ├── latest.pdeqn
│ │ ├── latest.pdopt
│ │ ├── latest.pdparams
│ │ └── latest.pdstates
│ ├── train.log
│ └── visual
│ └── epoch_0
│ └── result_u_v_w_sigmas.vtu
├── TRAIN.epochs=20,seed=1024 # 实验编号4的保存目录
│ ├── checkpoints
│ │ ├── latest.pdeqn
│ │ ├── latest.pdopt
│ │ ├── latest.pdparams
│ │ └── latest.pdstates
│ ├── train.log
│ └── visual
│ └── epoch_0
│ └── result_u_v_w_sigmas.vtu
└── TRAIN.epochs=20,seed=42 # 实验编号2的保存目录
├── checkpoints
│ ├── latest.pdeqn
│ ├── latest.pdopt
│ ├── latest.pdparams
│ └── latest.pdstates
├── train.log
└── visual
└── epoch_0
└── result_u_v_w_sigmas.vtu
- 该文件夹是程序运行时根据日期自动创建得到,此处表示2023年10月14日
- 该文件夹是程序运行时根据运行时刻(世界标准时间,UTC)自动创建得到,此处表示04点01分52秒
- 该文件夹是 multirun 模式下额外产生一个总配置目录,主要用于保存 multirun.yaml,其内的
hydra.overrides.task字段记录了用于组合出不同运行参数的原始配置。
考虑到用户的阅读和学习成本,本章节只介绍了常用的实验方法,更多进阶用法请参考 hydra官方教程。
1.2 模型推理预测¶
若需使用训练完毕保存或下载得到的模型文件 *.pdprams 直接进行推理(预测),可以参考以下代码示例。
-
加载
*.pdparams文件内的参数到模型中import ppsci import numpy as np # 实例化一个输入为 (x,y,z) 三个维度上的坐标,输出为 (u,v,w) 三个维度上的速度的 model model = ppsci.arch.MLP(("x", "y", "z"), ("u", "v", "w"), 5, 64, "tanh") # 用该模型及其对应的预训练模型路径(或下载地址 url)两个参数初始化 solver solver = ppsci.solver.Solver( model=model, pretrained_model_path="/path/to/pretrained.pdparams", ) # 在 Solver(...) 中会自动从给定的 pretrained_model_path 加载(下载)参数并赋值给 model 的对应参数 -
准备好用于预测的输入数据,并以字典
dict的方式传递给solver.predict。N = 100 # 假设要预测100个样本的结果 x = np.random.randn(N, 1) # 准备 字段 y = np.random.randn(N, 1) z = np.random.randn(N, 1) input_dict = { "x": x, "y": y, "z": z, } output_dict = solver.predict( input_dict, batch_size=32, # 推理时的 batch_size return_numpy=True, # 返回结果是否转换为 numpy ) # output_dict 预测结果同样以字典的形式保存在 output_dict 中,其具体内容如下 for k, v in output_dict.items(): print(f"{k} {v.shape}") # "u": (100, 1) # "v": (100, 1) # "w": (100, 1)
1.3 断点继续训练¶
在模型的日常训练中,可能存在机器故障或者用户手动操作而中断训练的情况,针对这种情况 PaddleScience 提供了断点继续训练的功能,即在训练时默认会保存最近一个训练完毕的 epoch 对应的各种参数到以下 5 个文件中:
latest.pdparams,该文件保存了神经网络模型的所有权重参数。latest.pdopt,该文件保存了优化器(如 Adam 等一些带有动量记录功能的优化器)的所有参数。latest.pdeqn,该文件保存了所有方程的参数,在一些逆问题中如果方程本身含有待估计(可学习)的参数,那么该文件就会保存这些参数。latest.pdstates,该文件保存了 latest 对应 epoch 的所有评估指标以及 epoch 数。latest.pdscaler(可选),在开启自动混合精度(AMP)功能时,该文件保存了GradScaler梯度缩放器内部的参数。
因此我们只需要在 Solver 时指定 checkpoint_path 参数为 latest.* 的所在路径,即可自动载入上述的几个文件,并从 latest 中记录的 epoch 开始继续训练。
路径填写注意事项
此处只需将路径填写到 "latest" 为止即可,不需要加上其后缀,程序会根据 "/path/to/latest",自动补充不同文件对应的后缀名来加载 latest.pdparams、latest.pdopt 等文件。
1.4 迁移学习¶
迁移学习是一种广泛使用、低成本提高模型精度的训练方式。在 PaddleScience 中,可以通过在 model 实例化完毕之后,手动为其载入预训练模型权重;也可以在 Solver 实例化时指定 pretrained_model_path 自动载入预训练模型权重,两种方式都可以进行迁移学习。
迁移学习建议
在迁移学习时,相对于完全随机初始化的参数而言,载入的预训练模型权重参数是一个较好的初始化状态,因此不需要使用太大的学习率,而可以将学习率适当调小 2~10 倍以获得更稳定的训练过程和更好的精度。
1.5 模型评估¶
当模型训练完毕之后,如果想手动对某一个模型权重文件,评估其在数据集上的精度,则在 Solver 实例化时指定参数 pretrained_model_path 为该权重文件的路径,然后调用 Solver.eval() 即可。
import ppsci
import ppsci.utils
...
...
solver = ppsci.solver.Solver(
...,
...,
pretrained_model_path="/path/to/model"
)
solver.eval()
1.6 使用 VisualDL 记录实验¶
VisualDL 是飞桨推出的可视化分析工具,以丰富的图表呈现训练参数变化趋势、数据样本、模型结构、PR曲线、ROC曲线、高维数据分布等。帮助用户清晰直观地理解深度学习模型训练过程及模型结构,进而实现高效的模型调优。
PaddleScience 支持使用 VisualDL 记录训练过程中的基础实验数据,包括 train/eval loss,eval metric,learning rate 等基本信息,可按如下步骤使用该功能。
-
安装 VisualDL
-
在案例代码的
Solver实例化时指定use_visualdl=True,然后再启动案例训练 -
可视化记录数据
根据上述步骤,在训练时 VisualDL 会自动记录数据并保存到
${solver.output_dir}/vdl的目录中。vdl所在路径在实例化Solver时,会自动打印在终端中,如下所示。Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.8, Runtime API Version: 11.6 device: 0, cuDNN Version: 8.4. ppsci INFO: VisualDL tool enabled for logging, you can view it by running: 'visualdl --logdir outputs_darcy2d/2023-10-08/10-00-00/TRAIN.epochs=400/vdl --port 8080'.在终端里输入上述可视化命令,并用浏览器进入 VisualDL 给出的可视化地址,即可在浏览器内查看记录的数据,如下图所示。

1.7 使用 WandB 记录实验¶
WandB 是一个第三方实验记录工具,能在记录实验数据的同时将数据上传到其用户的私人账户上,防止实验记录丢失。
PaddleScience 支持使用 WandB 记录基本的实验数据,包括 train/eval loss,eval metric,learning rate 等基本信息,可按如下步骤使用该功能
-
安装 wandb
-
注册 wandb 并在终端登录
-
在案例中开启 wandb
solver = ppsci.solver.Solver( ..., use_wandb=True, wandb_config={ "project": "PaddleScience", "name": "Laplace2D", "dir": OUTPUT_DIR, }, ... ) solver.train()如上述代码所示,指定
use_wandb=True,并且设置wandb_config配置字典中的project、name、dir三个字段,然后启动训练即可。训练过程会实时上传记录数据至 wandb 服务器,训练结束后可以进入终端打印的预览地址在网页端查看完整训练记录曲线。注意
由于每次调用
wandb.log会使得其自带的计数器Step自增 1,因此在 wandb 的网站上查看训练记录时,需要手动更改 x 轴的单位为step(全小写),如下所示。否则默认单位为 wandb 自带的
Step(S大写) 字段,会导致显示步数比实际步数多几倍。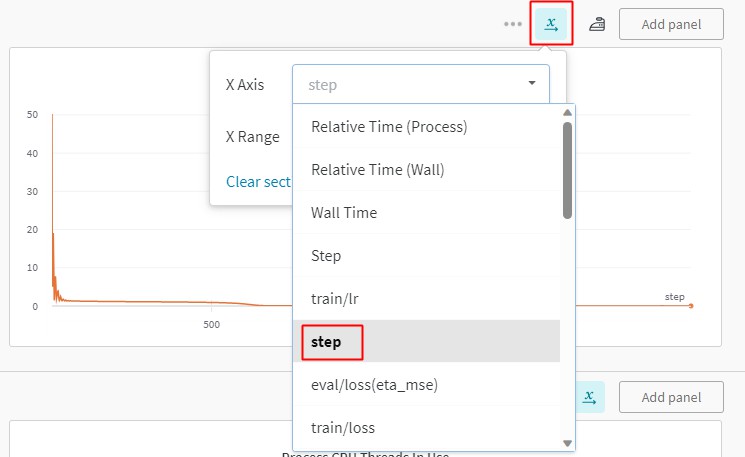
2. 进阶功能¶
2.1 分布式训练¶
2.1.1 数据并行¶
接下来以 examples/pipe/poiseuille_flow.py 为例,介绍如何正确使用 PaddleScience 的数据并行功能。分布式训练细节可以参考:Paddle-使用指南-分布式训练-快速开始-数据并行。
-
在 constraint 实例化完毕后,将
ITERS_PER_EPOCH重新赋值为经过自动多卡数据切分后的dataloader的长度(一般情况下其长度等于单卡 dataloader 的长度除以卡数,向上取整),如代码中高亮行所示。 -
使用分布式训练命令启动训练,以 4 卡数据并行训练为例
2.2 自动混合精度训练¶
接下来介绍如何正确使用 PaddleScience 的自动混合精度功能。自动混合精度的原理可以参考:Paddle-使用指南-性能调优-自动混合精度训练(AMP)。
实例化 Solver 时加上 2 个参数: use_amp=True, amp_level="O1"(或amp_level="O2")。如代码中高亮行所示,通过指定 use_amp=True,开启自动混合精度功能,接着再设置 amp_level="O1",指定混合精度所用的模式,O1 为自动混合精度,O2 为更激进的纯 fp16 训练模式,一般推荐使用 O1。
# initialize solver
solver = ppsci.solver.Solver(
...,
...,
use_amp=True,
amp_level="O1", # or amp_level="O2"
)
2.3 梯度累加¶
接下来介绍如何正确使用 PaddleScience 的梯度累加功能。梯度累加的原理可以参考:Paddle-使用指南-性能调优-自动混合精度训练(AMP)-动态图下使用梯度累加。
实例化 Solver 时指定 update_freq 参数为大于 1 的正整数即可。如代码中高亮行所示,update_freq 可以设置为 2 或者更大的整数,推荐使用 2、4、8,此时对于训练任务来说,全局 batch size 等价于 update_freq * batch size。梯度累加方法在大多数场景中能够让间接地扩大每个 batch 内的样本数量,从而让每个 batch 分布更接近真实数据分布,提升训练任务的性能。
2.4 多任务学习¶
在机理驱动、数理融合场景中,往往会同时优化多个损失项,如控制方程残差损失、(初)边值条件损失等。在训练过程中这些损失项对参数的梯度方向可能会互相冲突,阻碍训练精度收敛,而这正是多任务学习方法能解决的问题。因此 PaddleScience 在多任务学习模块中引入了几种常见的算法,其主要通过对不同任务的权重和产生的梯度进行调整,从而缓解该问题,最终提升模型收敛精度。下面以 PCGrad 方法进行举例,使用方式如下:
-
实例化一个多任务学习方法的对象
-
将该对象作为
Solver的实例化参数之一传入 -
启动训练,训练过程中
loss_aggregator会自动对获取到的多个损失项应用对应的多任务学习方法进行优化影响说明
个别多任务学习方法(如weight based method)可能会改变训练过程中损失函数的计算方式,但仅限于影响训练过程,模型评估过程的损失计算方式保持不变。
创建日期: November 6, 2023