LabelFree-DNN-Surrogate (Aneurysm flow & Pipe flow)¶
Case 1: Pipe Flow
Case 2: Aneurysm Flow
Case 1: Pipe Flow
python poiseuille_flow.py mode=eval EVAL.pretrained_model_path=https://paddle-org.bj.bcebos.com/paddlescience/models/LabelFree-DNN-Surrogate/poiseuille_flow_pretrained.pdparams
Case 2: Aneurysm Flow
wget -c https://paddle-org.bj.bcebos.com/paddlescience/datasets/LabelFree-DNN-Surrogate/LabelFree-DNN-Surrogate_data.zip
unzip LabelFree-DNN-Surrogate_data.zip
python aneurysm_flow.py mode=eval EVAL.pretrained_model_path=https://paddle-org.bj.bcebos.com/paddlescience/models/LabelFree-DNN-Surrogate/aneurysm_flow.pdparams
| Pretrained Model | Metrics |
|---|---|
| aneurysm_flow.pdparams | L-2 error u : 2.548e-4 L-2 error v : 7.169e-5 |
1. Background Introduction¶
Numerical simulation of fluid dynamics problems mainly relies on using polynomials to discretize governing equations in space and/or time into finite-dimensional algebraic systems. Due to the multi-scale nature of physics and sensitivity to meshing of complex geometries, such a process is prohibitively expensive for most real-time applications (e.g., clinical diagnosis and surgical planning) and multi-query analysis (e.g., optimization design and uncertainty quantification). In this paper, we provide a physics-constrained DL method for surrogate modeling of fluid flows without relying on any simulation data. Specifically, a structured deep neural network (DNN) architecture is designed to enforce initial and boundary conditions, and governing partial differential equations (i.e., Navier-Stokes equations) are incorporated into the DNN loss to drive training. Numerical experiments are conducted on a number of internal flows relevant to hemodynamic applications, and forward propagation of uncertainties in fluid properties and domain geometry is studied. Results show that flow fields and forward propagated uncertainties agree well between DL surrogate approximations and first-principle numerical simulations.
2. Case 1: PipeFlow¶
2.1 Problem Definition¶
Pipe flow is a very common and commonly used fluid system, such as blood in arteries or airflow in the trachea. Generally, pipe flow is driven by pressure differences at both ends of the pipe, or driven by gravitational body force. In the cardiovascular system, the former is more dominant because blood flow is mainly controlled by pressure drops caused by heart pumping. In general, simulating fluid dynamics in a tube requires numerically solving the full Navier-Stokes equations, but if the tube is straight and has a constant circular cross-section, an analytical solution for fully developed steady flow can be obtained, i.e., an ideal benchmark to verify the performance of the proposed method. Therefore, we first study flow in a two-dimensional circular tube (also known as Poiseuille flow).
Mass conservation:
\(x\) momentum conservation:
\(y\) momentum conservation:
We only focus on this fully developed flow and impose no-slip boundary conditions at the boundaries. Different from traditional PINNs methods, we force no-slip boundary conditions on boundaries through velocity function assumptions: For fluid domain boundaries and internal circular boundaries of the fluid domain, Dirichlet boundary conditions need to be imposed:
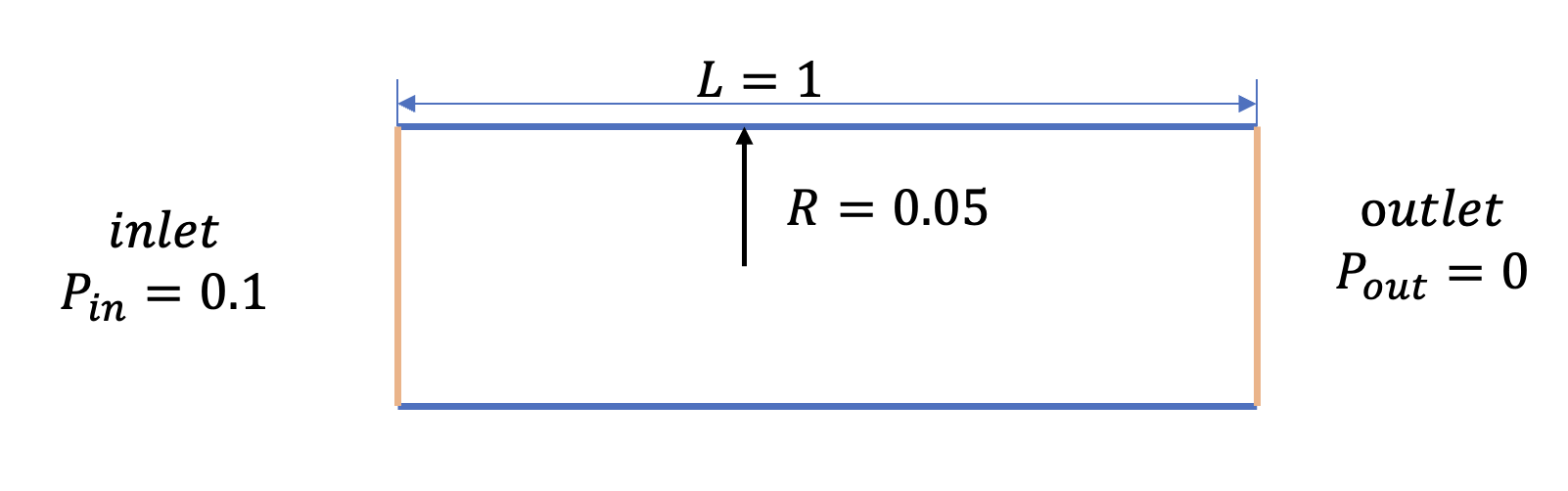
Fluid domain inlet boundary:
Fluid domain outlet boundary:
Fluid domain upper and lower boundaries:
2.2 Problem Solving¶
Next, we will explain how to convert the problem into PaddleScience code step by step and solve the problem using deep learning methods. In order to quickly understand PaddleScience, only key steps such as model construction, equation construction, and computational domain construction are described below, while other details please refer to API Documentation.
2.2.1 Model Construction¶
In this case, each known coordinate point and the dynamic viscosity coefficient triplet \((x, y, \nu)\) of that point has its own transverse velocity \(u\), longitudinal velocity \(v\), and pressure \(p\) Three unknown quantities to be solved. Here we use three relatively simple MLPs (Multilayer Perceptrons) to represent the mapping functions \(f_1, f_2, f_3: \mathbb{R}^3 \to \mathbb{R}^3\) from \((x, y, \nu)\) to \((u, v, p)\), i.e.:
In the above formula, \(f_1, f_2, f_3\) are the MLP models themselves, \(transform_{input}, transform_{output}\), represent imposing additional structured custom layers for imposing constraints and enriching inputs, expressed in PaddleScience code as follows:
In order to access the values of specific variables accurately and quickly during calculation, we specify here that the input variable names of the network model are ["x", "y", "nu"], and the output variable names are ["u", "v", "p"]. These names are consistent with subsequent code.
Then by specifying the number of layers, number of neurons, and activation function of the MLP, we instantiated three neural network models model_u model_v model_p with 3 layers of hidden neurons and 1 layer of output layer neurons, each layer having 50 neurons, using "swish" as the activation function.
2.2.2 Equation Construction¶
Since this case uses the 2D steady-state form of the Navier-Stokes equation, NavierStokes built into PaddleScience can be used directly.
When instantiating the NavierStokes class, necessary parameters need to be specified: dynamic viscosity \(\nu\) is network output, fluid density \(\rho=1.0\).
2.2.3 Computational Domain Construction¶
In this paper, the computational domain and parameter independent variable \(\nu\) of this case are composed of point clouds generated by numpy random numbers, so the built-in point cloud geometry PointCloud of PaddleScience can be used directly to combine into a spatial Geometry computational domain.
2.2.4 Constraint Construction¶
According to the formulas and boundary conditions obtained in 2.1 Problem Definition, corresponding to several constraints guiding model training in the computational domain, namely:
-
Navier-Stokes equation constraints imposed on internal points of the fluid domain
Mass conservation:
\[ \dfrac{\partial u}{\partial x} + \dfrac{\partial v}{\partial y} = 0 \]\(x\) momentum conservation:
\[ u\dfrac{\partial u}{\partial x} + v\dfrac{\partial u}{\partial y} +\dfrac{1}{\rho}\dfrac{\partial p}{\partial x} - \nu(\dfrac{\partial ^2 u}{\partial x ^2} + \dfrac{\partial ^2 u}{\partial y ^2}) = 0 \]\(y\) momentum conservation:
\[ u\dfrac{\partial v}{\partial x} + v\dfrac{\partial v}{\partial y} +\dfrac{1}{\rho}\dfrac{\partial p}{\partial y} - \nu(\dfrac{\partial ^2 v}{\partial x ^2} + \dfrac{\partial ^2 v}{\partial y ^2}) = 0 \]In order to facilitate obtaining intermediate variables, the
NavierStokesclass internally names the results on the left side of the above equation ascontinuity,momentum_x,momentum_yrespectively. -
Dirichlet boundary condition constraints imposed on the inlet and outlet of the fluid domain, and the upper and lower vessel wall boundaries of the fluid domain. As one of the innovations of this paper, this case innovatively uses structured boundary conditions, that is, adding a formula layer after the output layer of the network to impose boundary conditions (the value of the formula is zero at the boundary). Avoid the deficiency that data points as boundary conditions cannot be effectively constrained. Unified use of class function
Transform()for initialization and management. The specific inference process is:The formula form of the correction function for the upper and lower boundaries (vessel walls) of the fluid domain is:
\[ \hat{u}(t,x,\theta;W,b) = u_{par}(t,x,\theta) + D(t,x,\theta)\tilde{u}(t,x,\theta;W,b) \]\[ \hat{p}(t,x,\theta;W,b) = p_{par}(t,x,\theta) + D(t,x,\theta)\tilde{p}(t,x,\theta;W,b) \]Where \(u_{par}\) and \(p_{par}\) are particular solutions satisfying boundary conditions and initial conditions. After substituting specific correction functions, we get:
\[ \hat{u} = (\dfrac{d^2}{4} - y^2) \tilde{u} \]\[ \hat{v} = (\dfrac{d^2}{4} - y^2) \tilde{v} \]\[ \hat{p} = \dfrac{x - x_{in}}{x_{out} - x_{in}}p_{out} + \dfrac{x_{out} - x}{x_{out} - x_{in}}p_{in} + (x - x_{in})(x_{out} - x) \tilde{p} \]
Next, use PaddleScience built-in InteriorConstraint and model Transform custom layer to construct the above two constraints.
-
Internal point constraint
Taking
InteriorConstraintacting on internal points of the fluid domain as an example, the code is as follows:The first parameter of
InteriorConstraintis the equation expression, used to describe how to calculate the constraint target. Here fill inequation["NavierStokes"].equationsinstantiated in section 2.2.2 Equation Construction;The second parameter is the target value of the constraint variable. In this problem, we hope that the three intermediate results
continuity,momentum_x,momentum_ygenerated by the Navier-Stokes equation are optimized to 0, so set all their target values to 0;The third parameter is the computational domain where the constraint equation acts. Here fill in
interior_geominstantiated in section 2.2.3 Computational Domain Construction;The fourth parameter is the sampling configuration on the computational domain. Here we use batch data point training, so the
datasetfield is set toNamedArrayDatasetanditers_per_epochis also set to 1, and the sampling point numberbatch_sizeis set to 128;The fifth parameter is the loss function. Here we choose the commonly used MSE function, and
reductionis set to"mean", which means we will sum and average the loss terms generated by all data points participating in calculation;The sixth parameter is the name of the constraint condition. We need to name each constraint condition for subsequent indexing. Here we name it "EQ".
2.2.5 Hyperparameter Setting¶
Next, we need to specify the number of training epochs and learning rate. Use 3000 training epochs, and learning rate set to 0.005.
2.2.6 Optimizer Construction¶
The training process will call the optimizer to update model parameters. Here, the more commonly used Adam optimizer is selected.
2.2.7 Model Training, Evaluation and Visualization¶
After completing the above settings, you only need to pass the instantiated objects to ppsci.solver.Solver in order, and then start training.
On the other hand, the visualization and quantitative evaluation of this case mainly rely on:
-
Comparison of velocity \(u(y)\) with \(y\) at \(x=0\) section under four different dynamic viscosity coefficient \({\nu}\) samplings and analytical solutions
-
When we select truncated Gaussian distribution of dynamic viscosity coefficient \({\nu}\) sampling (mean \(\hat{\nu} = 10^{−3}\), variance \(\sigma_{\nu}=2.67 \times 10^{−4}\)), comparison of probability density function of velocity at center and analytical solution
159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 | |
2.3 Complete Code¶
| poiseuille_flow.py | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 | |
2.4 Result Display¶
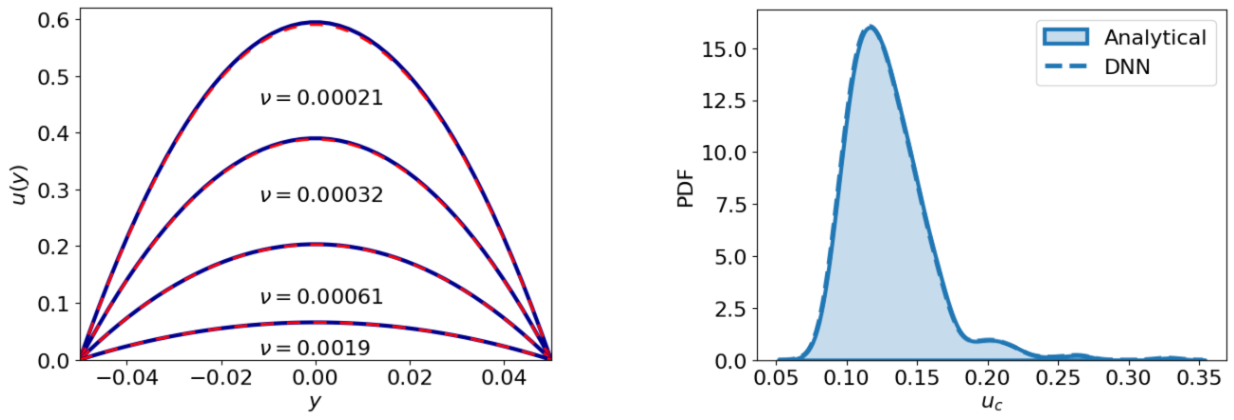
The result of the DNN surrogate model is shown in the left figure, compared with the exact solution of Poiseuille flow (Equation 13 in the paper):
\(y\) in the formula and picture represents the spanwise coordinate, \(\delta p\). From the picture, we can observe that the velocity curves (red dashed lines) under 4 different viscosity samplings predicted by DNN almost perfectly match the velocity curves of the analytical solution (blue solid lines). Among them, the Reynolds numbers (\(Re\)) of the 4 cases are 283, 121, 33, 3 respectively. In fact, as long as the Reynolds number is moderate, DNN can accurately predict pipe flow for any given dynamic viscosity coefficient.
The right figure shows the uncertainty of the centerline (pipe center in x direction) velocity under a given dynamic viscosity coefficient (Gaussian distribution). The Gaussian distribution of the dynamic viscosity coefficient has a mean of \(1e^{-3}\) and a variance of \(2.67e^{-4}\), which ensures that the dynamic viscosity coefficient is a positive random variable. In addition, the interval of this Gaussian distribution is \((0,+\infty)\), and the probability density function is:
For more details, please refer to page 9 of the paper.
3. Case 2: Aneurysm Flow¶
3.1 Problem Definition¶
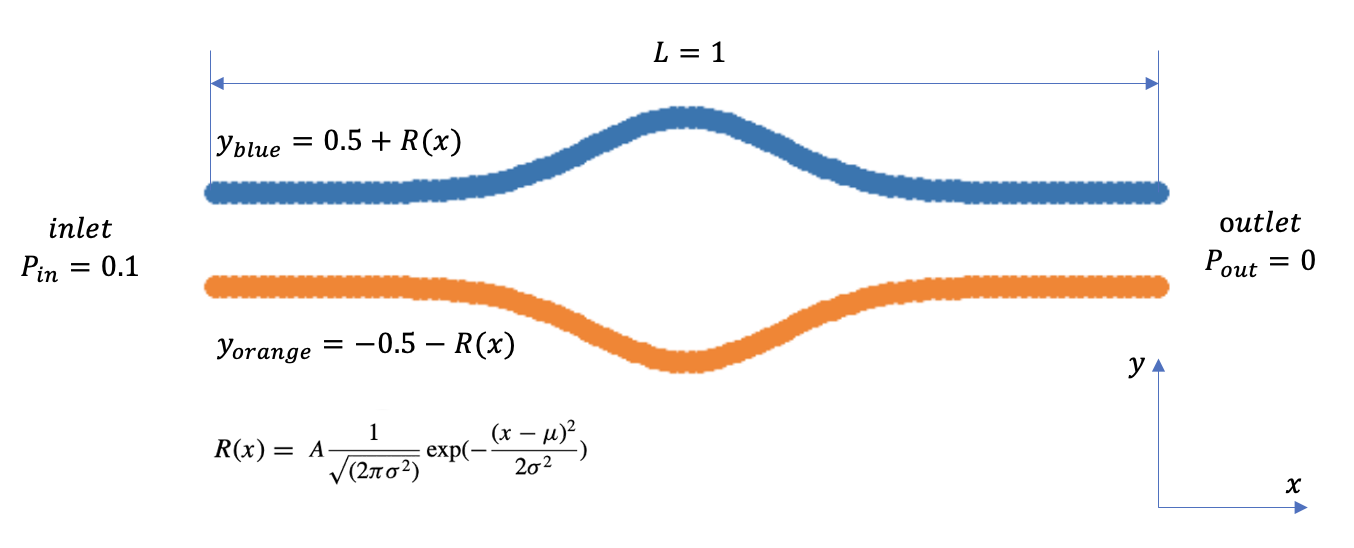
This paper mainly studies two types of typical vascular flows (with standardized vascular geometries), stenosis flow and aneurysm flow. Stenosis blood flow refers to blood flow through blood vessels where the vessel wall narrows and re-expands. This local restriction of blood vessels is associated with many cardiovascular diseases, such as arteriosclerosis, stroke and heart attack. Vascular blood flow within an aneurysm, i.e., arterial dilation due to weak vessel walls, is called aneurysm blood flow. Aneurysm rupture can lead to life-threatening conditions, for example, subarachnoid hemorrhage (SAH) due to cerebral aneurysm rupture, and the study of hemodynamics can improve diagnosis and basic understanding of aneurysm progression and rupture.
Although realistic vascular geometries are usually irregular and complex, including curvature, bifurcations and junctions, idealized stenosis and aneurysm models are studied here for proof of concept. Namely, both stenotic vessels and aneurysm vessels are idealized as axisymmetric tubes with varying cross-sectional radii, parameterized by the following functions,
Mass conservation:
\(x\) momentum conservation:
\(y\) momentum conservation:
We only focus on this fully developed flow and impose no-slip boundary conditions at the boundaries. Different from traditional PINNs methods, we force no-slip boundary conditions on boundaries through velocity function assumptions: For fluid domain boundaries and internal circular boundaries of the fluid domain, Dirichlet boundary conditions need to be imposed:
Fluid domain inlet boundary:
Fluid domain outlet boundary:
Fluid domain upper and lower boundaries:
3.2 Problem Solving¶
Next, we will explain how to convert the problem into PaddleScience code step by step and solve the problem using deep learning methods. In order to quickly understand PaddleScience, only key steps such as model construction, equation construction, and computational domain construction are described below, while other details please refer to API Documentation.
3.2.1 Model Construction¶
In this case, each known coordinate point and geometry magnification factor \((x, y, scale)\) has its own transverse velocity \(u\), longitudinal velocity \(v\), and pressure \(p\) Three unknown quantities to be solved. Here we use three relatively simple MLPs (Multilayer Perceptrons) to represent the mapping functions \(f_1, f_2, f_3: \mathbb{R}^3 \to \mathbb{R}^3\) from \((x, y, scale)\) to \((u, v, p)\), i.e.:
In the above formula, \(f_1, f_2, f_3\) are the MLP models themselves, \(transform_{input}, transform_{output}\), represent imposing additional structured custom layers for imposing constraints and linking inputs, expressed in PaddleScience code as follows:
In order to access the values of specific variables accurately and quickly during calculation, we specify here that the input variable names of the network model are ["x", "y", "scale"], and the output variable names are ["u", "v", "p"]. These names are consistent with subsequent code.
Then by specifying the number of layers, number of neurons, and activation function of the MLP, we instantiated three neural network models model_1 model_2 model_3 with 3 layers of hidden neurons and 1 layer of output layer neurons, each layer having 20 neurons, using "silu" as the activation function.
In addition, initialize weights and biases using kaiming normal method.
3.2.2 Equation Construction¶
Since this case uses the 2D steady-state form of the Navier-Stokes equation, NavierStokes built into PaddleScience can be used directly.
When instantiating the NavierStokes class, necessary parameters need to be specified: dynamic viscosity \(\nu = 0.001\), fluid density \(\rho = 1.0\).
3.2.3 Computational Domain Construction¶
In this paper, the computational domain and parameter independent variable \(scale\) of this case are composed of point clouds generated by numpy random numbers, so the built-in point cloud geometry PointCloud of PaddleScience can be used directly to combine into a spatial Geometry computational domain.
3.2.4 Constraint Construction¶
According to the formulas and boundary conditions obtained in 3.1 Problem Definition, corresponding to several constraints guiding model training in the computational domain, namely:
-
Navier-Stokes equation constraints imposed on internal points of the fluid domain
Mass conservation:
\[ \dfrac{\partial u}{\partial x} + \dfrac{\partial v}{\partial y} = 0 \]\(x\) momentum conservation:
\[ u\dfrac{\partial u}{\partial x} + v\dfrac{\partial u}{\partial y} +\dfrac{1}{\rho}\dfrac{\partial p}{\partial x} - \nu(\dfrac{\partial ^2 u}{\partial x ^2} + \dfrac{\partial ^2 u}{\partial y ^2}) = 0 \]\(y\) momentum conservation:
\[ u\dfrac{\partial v}{\partial x} + v\dfrac{\partial v}{\partial y} +\dfrac{1}{\rho}\dfrac{\partial p}{\partial y} - \nu(\dfrac{\partial ^2 v}{\partial x ^2} + \dfrac{\partial ^2 v}{\partial y ^2}) = 0 \]In order to facilitate obtaining intermediate variables, the
NavierStokesclass internally names the results on the left side of the above equation ascontinuity,momentum_x,momentum_yrespectively. -
Dirichlet boundary condition constraints imposed on the inlet and outlet of the fluid domain, and the upper and lower vessel wall boundaries of the fluid domain. As one of the innovations of this paper, this case innovatively uses structured boundary conditions, that is, adding a formula layer after the output layer of the network to impose boundary conditions (the value of the formula is zero at the boundary). Avoid the deficiency that data points as boundary conditions cannot be effectively constrained. Unified use of class function
Transform()for initialization and management. The specific inference process is:Let stenosis scaling factor be \(A\):
\[ R(x) = R_{0} - A\dfrac{1}{\sqrt{2\pi\sigma^2}}exp(-\dfrac{(x-\mu)^2}{2\sigma^2}) \]\[ d = R(x) \]Specific correction functions are substituted to get:
\[ \hat{u} = (\dfrac{d^2}{4} - y^2) \tilde{u} \]\[ \hat{v} = (\dfrac{d^2}{4} - y^2) \tilde{v} \]\[ \hat{p} = \dfrac{x - x_{in}}{x_{out} - x_{in}}p_{out} + \dfrac{x_{out} - x}{x_{out} - x_{in}}p_{in} + (x - x_{in})(x_{out} - x) \tilde{p} \]
Next, use PaddleScience built-in InteriorConstraint and model Transform custom layer to construct the above two constraints.
-
Internal point constraint
Taking
InteriorConstraintacting on internal points of the fluid domain as an example, the code is as follows:The first parameter of
InteriorConstraintis the equation expression, used to describe how to calculate the constraint target. Here fill inequation["NavierStokes"].equationsinstantiated in section 3.2.2 Equation Construction;The second parameter is the target value of the constraint variable. In this problem, we hope that the three intermediate results
continuity,momentum_x,momentum_ygenerated by the Navier-Stokes equation are optimized to 0, so set all their target values to 0;The third parameter is the computational domain where the constraint equation acts. Here fill in
interior_geominstantiated in section 3.2.3 Computational Domain Construction;The fourth parameter is the sampling configuration on the computational domain. Here we use batch data point training, so the
datasetfield is set toNamedArrayDatasetanditers_per_epochis also set to 1, and the sampling point numberbatch_sizeis set to 128;The fifth parameter is the loss function. Here we choose the commonly used MSE function, and
reductionis set to"mean", which means we will sum and average the loss terms generated by all data points participating in calculation;The sixth parameter is the name of the constraint condition. We need to name each constraint condition for subsequent indexing. Here we name it "EQ".
3.2.5 Hyperparameter Setting¶
Next, we need to specify the number of training epochs and learning rate. Use 400 training epochs, and learning rate set to 0.005.
3.2.6 Optimizer Construction¶
The training process will call the optimizer to update model parameters. Here, the more commonly used Adam optimizer is selected.
3.2.7 Model Training, Evaluation and Visualization (Need to download data)¶
After completing the above settings, you only need to pass the instantiated objects to ppsci.solver.Solver in order, and then inference.
3.3 Complete Code¶
| aneurysm_flow.py | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 | |
3.4 Result Display¶
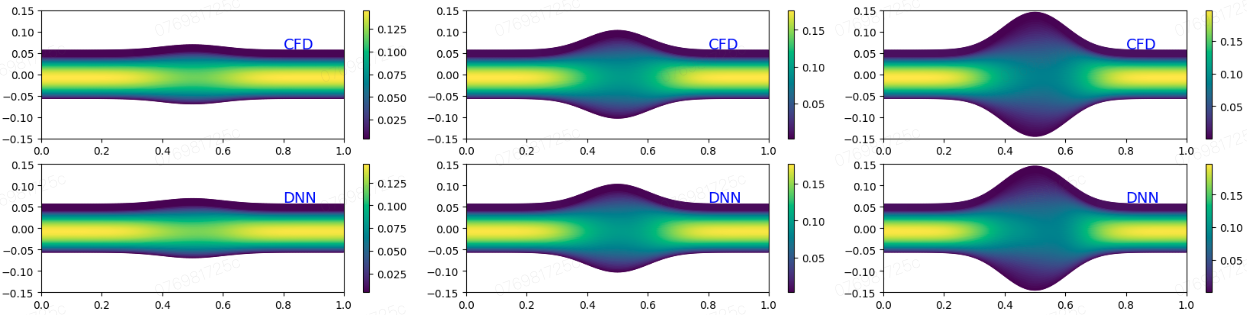
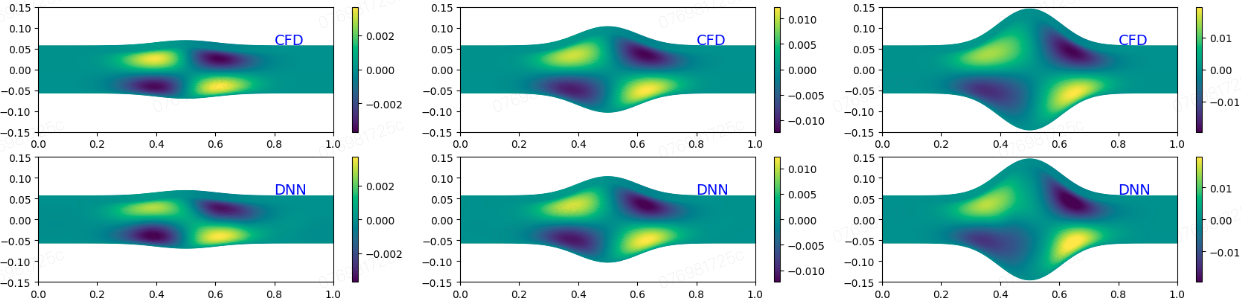
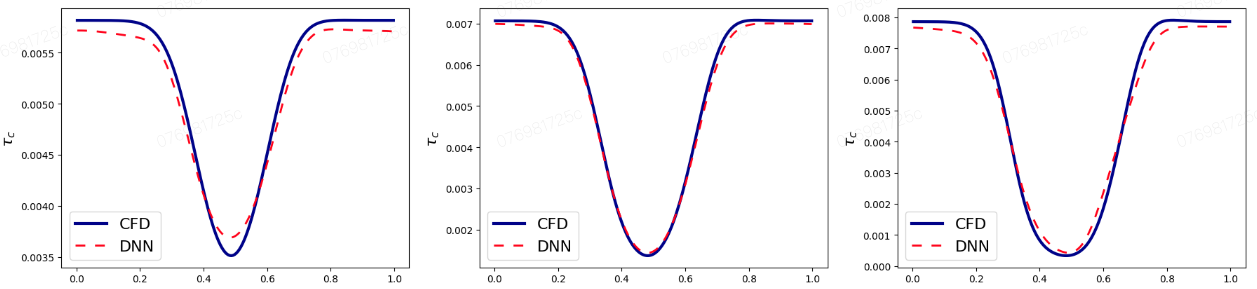
The picture shows the solving ability for geometrically varying aneurysm flow, where training is performed by sampling the geometric scaling factor \(A\) from the interval \(0\) to \(-2e^{-2}\). Flow field predictions for three different geometries are shown in the figure. The size of the aneurysm increases from left to right, the flow velocity decreases in the vessel expansion area, and decays most at the center of the aneurysm. From the first two rows of pictures, it can be seen that the CFD results and the model prediction results agree well. For WSS wall shear stress, the curve is also accurately captured by the model as the geometry changes.
For more details, refer to page 13 of the paper.
4. References¶
Reference code: LabelFree-DNN-Surrogate