CVit(Navier-Stokes)¶
| Pretrained Model | Metrics |
|---|---|
| ns_cvit_pretrained.pdparams | 4-step l2_error: 0.0396 |
1. Background Introduction¶
At this stage, the models used in the sciml field are quite different from advanced models in the CV and NLP fields, and do not make good use of the advantages provided by these advanced models. Therefore, the author of the paper first proposed a unified perspective of operator learning, summarized models such as DeepONet, FNO, and GNO according to Global conditioning and Local Conditioning respectively, and then designed a Global conditioning model CVit based on the Transformer structure widely used in CV and NLP fields. Compared with previous operator learning models, it has fewer parameters and higher accuracy.
The model structure is shown in the figure below:

2. Problem Definition¶
As an operator learning model, CVit takes the input function \(u\) and the query coordinate \(y\) of the function \(s\) as input, and outputs the function value \(s(y)\) at the query point \(y\) after operator mapping.
This problem is based on the incompressible buoyancy-driven flow in a fixed square cavity, solving the following equation:
Formulation We consider the vorticity-stream \((\omega-\psi)\) formulation of the incompressible Navier-Stokes equations on a two-dimensional periodic domain, \(D=D_u=D_v=[0,2 \pi]^2\) :
3. Problem Solving¶
Next, we will explain how to convert the problem into PaddleScience code step by step and solve the problem using deep learning methods. In order to quickly understand PaddleScience, only key steps such as model construction, equation construction, and computational domain construction are described below, while other details please refer to API Documentation.
3.1 Model Construction¶
In this problem, for each function \(u\), after being mapped to \(s\) by the operator learning model, there is a corresponding label \(s(y)\) on \(y\), so here CVit is used to represent the mapping relationship from \((u, y)\) to \(s(y)\):
In the above formula, \(G(u)\) is the CVit model itself, expressed in PaddleScience code as follows
In order to access the value of specific variables accurately and quickly during calculation, here we specify the input variable name of the network model as ("u", "y") and the output variable name as ("s"), these names are consistent with the subsequent code.
Then by specifying hyperparameters such as input dimension, coordinate dimension, output dimension, and number of model layers of CVit, a model can be instantiated
3.2 Data Preparation¶
The data slices in this problem are stored in NavierStokes2D/*.h5 files, divided into training and test sets, and their data contents are shown in the table below (this information will be printed during runtime).
| File Name | File Quantity | Data Shape | Input Shape | Label Shape |
|---|---|---|---|---|
| NavierStokes2D_train_*.h5 | 52 | [1000, 14, 128, 128, 3] |
[4000, 10, 128, 128, 3] |
[4000, 1, 128, 128, 3] |
| NavierStokes2D_test_*.h5 | 41 | [5200, 14, 128, 128, 3] |
[20800, 10, 128, 128, 3] |
[20800, 1, 128, 128, 3] |
The data reading function is as follows:
During training and testing, the previous 10 moments are used to predict the next moment, and during testing, 4 consecutive moments will be predicted in an autoregressive form.
3.3 Constraint Construction¶
3.3.1 Supervised Constraint¶
During training, batch_size groups of data from \(u\) and query_point \(y\) coordinates are randomly selected to form training input data, and label data is randomly selected from \(s\) with the same batch_size x query_point label points.
The first parameter of SupervisedConstraint is the data configuration for training. We use NamedArrayDataset as the dataset type, and pass in custom random_query as transforms to complete the above sample random selection process;
The second parameter is the calculation expression of the constraint. We only need to calculate \(s\), so fill in an anonymous expression that does not do any processing and directly takes out the model output result "s";
The third parameter is the loss function, here MSELoss function is selected;
The fourth parameter is the name of the constraint condition. Each constraint condition needs to be named for subsequent indexing. Here it is named "Sup".
3.4 Hyperparameter Setting¶
Next, the number of training epochs and learning rate need to be specified. Here, based on experimental experience, 200 training epochs are used, the initial learning rate is 0.001, the number of warm-up epochs is 5, the global gradient clipping coefficient is 1.0, and the weight decay is 1e-5.
3.5 Optimizer Construction¶
The training process will call the optimizer to update model parameters. Here, the more commonly used Adam optimizer is selected, and used in conjunction with the ExponentialDecay learning rate adjustment strategy commonly used in machine learning.
3.6 Validator Construction¶
Usually during the training process, the training status of the current model is evaluated using the validation set (test set) at a certain epoch interval, so ppsci.validate.SupervisedValidator is used to construct the validator.
In the process, we used the custom evaluation function l2_err_func to evaluate the 2-norm error of all samples and three output physical quantities on the test set.
3.7 Model Training and Evaluation¶
After completing the above settings, you only need to pass the instantiated objects to ppsci.solver.Solver in order, and then start training and evaluation.
4. Complete Code¶
| ns_cvit.py | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 | |
5. Result Display¶
The prediction results, reference results and absolute errors on the test set are shown in the figure below.
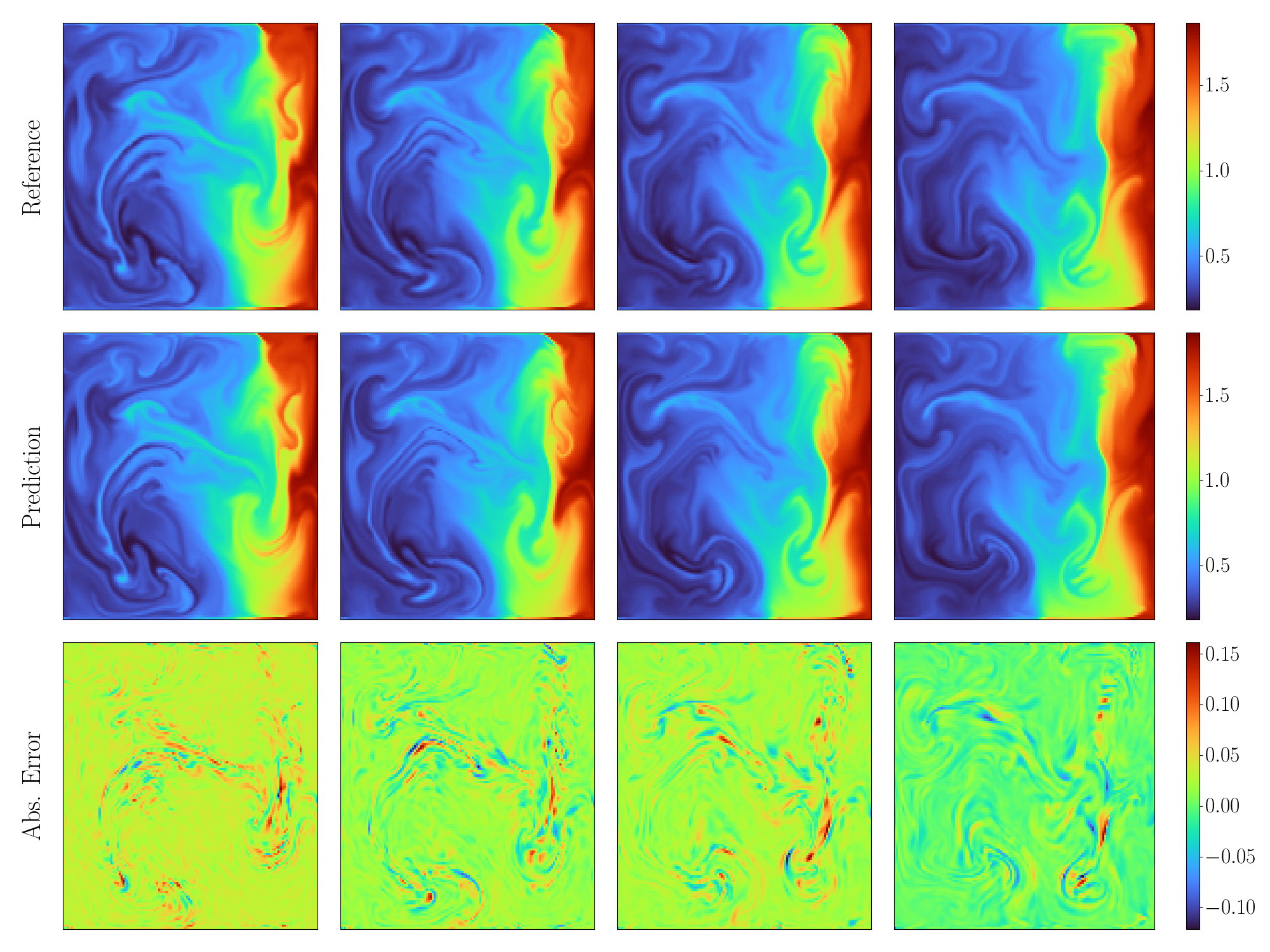
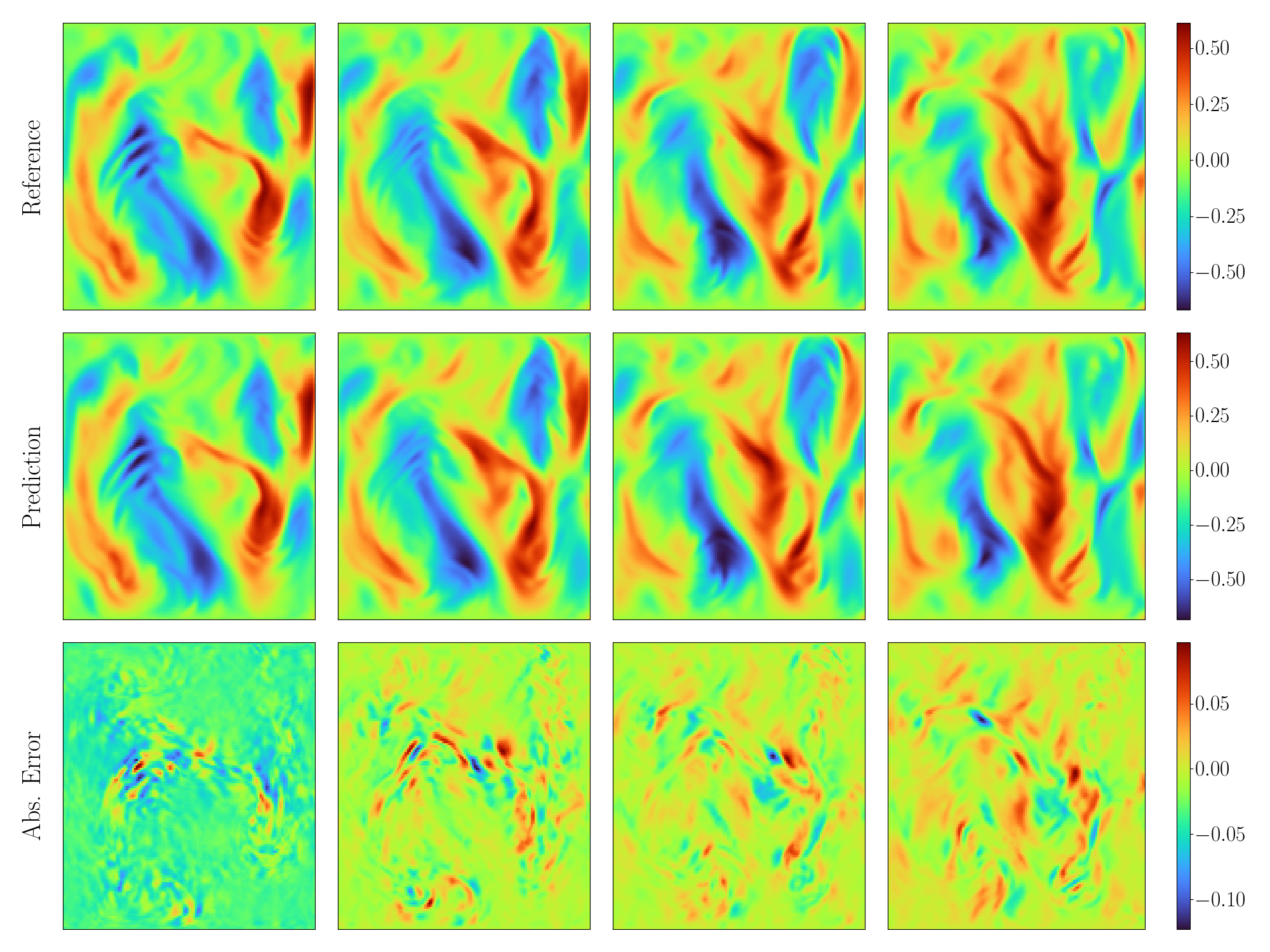
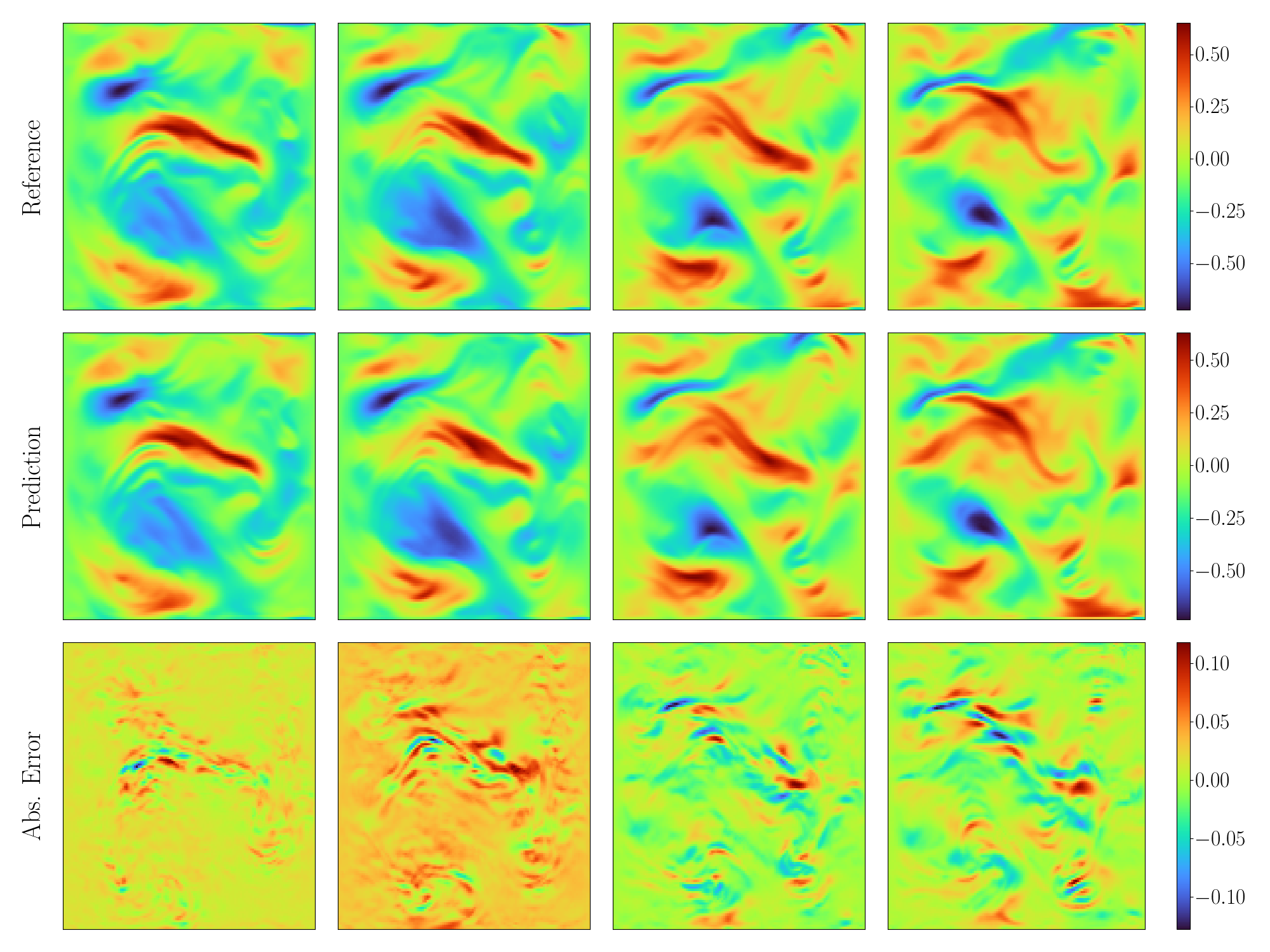
It can be seen that the three predicted physical quantities of the model are basically consistent with the reference results. Through autoregression, the average error of continuous inference for 4 steps is 0.039%.