Shock Wave¶
1. Background Introduction¶
Shock waves are a phenomenon frequently found in nature and engineering applications. They not only widely exist in compressible flows in the aerospace field, but also appear in other fields such as theoretical and applied physics and engineering applications. In supersonic and hypersonic flows, the appearance of shock waves will have a significant impact on the overall characteristics of fluid flow. The shock wave capturing problem has been developed in the CFD field for decades. Shock wave capturing methods based on the mathematical theory of weak solutions have developed rapidly due to their simplicity and ease of implementation, and have been widely used in numerical simulations of complex supersonic and hypersonic flows.
This case optimizes the PINN-WE model so that it can be applied to flow field simulations with strong shock waves such as supersonic and hypersonic flows.
The PINN-WE model reduces the fitting of strong gradient regions during PINN optimization through loss function weighting, avoiding the shock wave overfitting problem caused by strong gradients in shock wave regions. It has achieved good results in one-dimensional Euler problems and two-dimensional problems with weak shock waves. However, in supersonic two-dimensional flow fields, this model did not achieve very good results. In experiments, it was also found that the model often produces non-physical prediction results such as shock wave position deviation and asymmetric shock wave shape. Therefore, aiming at this problem of the above PINN-WE model, this case proposes the idea of progressive weighting, abandoning the idea of emphasizing gradients during the optimization process, but innovatively gradually strengthening the influence of gradient weights on model optimization, so that the model can obtain a better and physically consistent shock wave position during the optimization process.
2. Problem Definition¶
This problem simulates a cylindrical bow shock wave in a two-dimensional supersonic flow field, involving the two-dimensional Euler equations, as shown below:
Free stream conditions \(\rho_{\infty}=1.225 \mathrm{~kg} / \mathrm{m}^3\) ; \(P_{\infty}=1 \mathrm{~atm}\)
The overall process is shown below:
3. Problem Solving¶
Next, we will explain how to convert the problem into PaddleScience code step by step and solve the problem using deep learning methods. In order to quickly understand PaddleScience, only key steps such as model construction, equation construction, and computational domain construction are described below, while other details please refer to API Documentation.
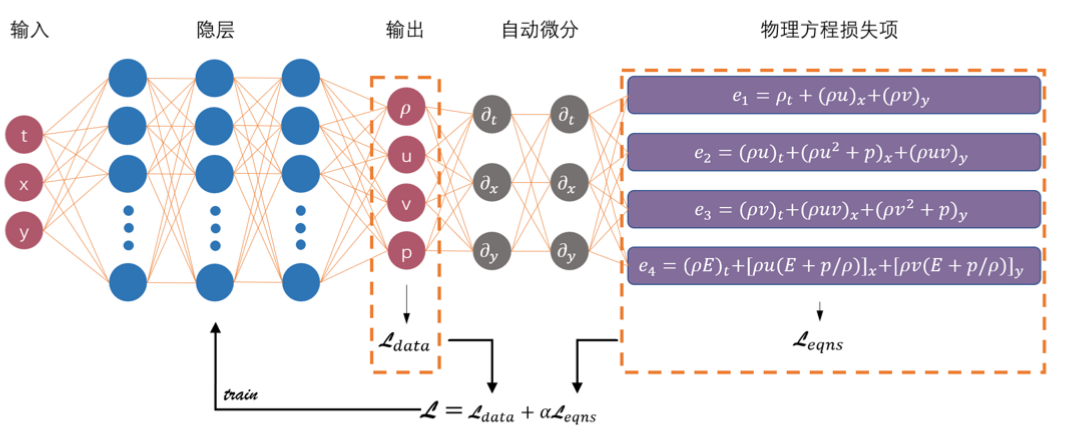
3.1 Model Construction¶
In the ShockWave problem, given time \(t\) and position coordinates \((x,y)\), the model is responsible for predicting the corresponding four physical quantities: \(x\) direction velocity, \(y\) direction velocity, pressure, and density \((u,v,p,\rho)\). Therefore, we use a relatively simple MLP (Multilayer Perceptron) here to represent the mapping function \(g: \mathbb{R}^3 \to \mathbb{R}^4\) from \((t,x,y)\) to \((u,v,p,\rho)\), that is:
In the above formula, \(g\) is the MLP model itself, expressed in PaddleScience code as follows
In order to accurately and quickly access the value of specific variables during calculation, we specify here that the input variable names of the network model are ("t", "x", "y") and the output variable names are ("u", "v", "p", "rho"). These names are consistent with subsequent code.
Then by specifying the number of layers, number of neurons, and activation function of the MLP, we instantiate a neural network model model with 9 hidden layers, 90 neurons per layer, using "tanh" as the activation function.
3.2 Equation Construction¶
This case involves two-dimensional Euler equations and equations on the boundary, as shown below
31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 | |
3.3 Computational Domain Construction¶
The computational domain of this case is 0 ~ 0.4 unit time, a rectangular area with a length of 1.5 and a width of 2.0, containing a circle with center coordinates [1, 1] and radius 0.25. The code is as follows
3.4 Constraint Construction¶
3.4.1 Interior Point Constraint¶
We apply the Euler equations to the interior points of the computational domain, and use the Latin HyperCube Sampling (LHS) method to sample a total of N_INTERIOR training points. The code is as follows:
3.4.2 Boundary Constraint¶
We apply boundary conditions to the boundary points of the computational domain, and also use the Latin HyperCube Sampling (LHS) method to sample a total of N_BOUNDARY training points on the boundary. The code is as follows:
3.4.3 Initial Value Constraint¶
We apply boundary conditions to the points at the initial time of the computational domain, and also use the Latin HyperCube Sampling (LHS) method to sample a total of N_BOUNDARY training points in the computational domain at the initial time. The code is as follows:
After the above three constraints are constructed, they need to be wrapped into a dictionary to facilitate subsequent passing as parameters
3.5 Hyperparameter Setting¶
Next, we need to specify the number of training epochs and learning rate. Here, based on experimental experience, we use 100 training epochs.
3.6 Optimizer Construction¶
The training process will call the optimizer to update model parameters. Here, the L-BFGS optimizer is selected and max_iter is set to 100.
3.7 Model Training and Visualization¶
After completing the above settings, you only need to pass the instantiated objects to ppsci.solver.Solver in order.
This case needs to calculate the weight coefficient relu in PDE and BC equations based on the epoch value of each training round. Therefore, after the solver instantiation is completed, it needs to be additionally passed to the equation itself. The code is as follows:
Finally, start training:
After training, we visualize the shock wave with a resolution of 600x600 in the computational domain at the last moment, totaling 360,000 points. The code is as follows:
4. Complete Code¶
| shock_wave.py | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 | |
5. Result Display¶
This case conducted experiments for two different parameter configurations: \(Ma=2.0\) and \(Ma=0.728\). The results are as follows:
.png)
.png)