The Rossler System, first proposed by German scientist Rossler, is also a common chaotic system. This system plays an important role in the study of chaos theory, providing a mathematical description and understanding method for chaotic phenomena. At the same time, because the system is extremely sensitive to numerical disturbances, it is also a good benchmark for evaluating the accuracy of machine learning (deep learning) models.
Next, we will explain how to solve this problem using deep learning methods based on PaddleScience code. This case is solved based on the method in the paper Transformers for Modeling Physical Systems. For the theoretical part of this method, please refer to this document or original paper. Next, the dataset used will be introduced first, and then the supervised constraint construction and model construction of the two training steps of this method (Embedding model training, Transformer model training) will be explained. For other details, please refer to API Documentation.
The dataset uses data provided in Transformer-Physx. This dataset is obtained using the traditional Runge-Kutta numerical solution method. The dataset is divided as follows:
# general settingsmode:train# running mode: train/evalseed:6output_dir:${hydra:run.dir}TRAIN_BLOCK_SIZE:16VALID_BLOCK_SIZE:32TRAIN_FILE_PATH:./datasets/rossler_training.hdf5VALID_FILE_PATH:./datasets/rossler_valid.hdf5# model settingsMODEL:input_keys:["states"]
This case solves the problem based on data-driven methods, so it is necessary to use SupervisedConstraint built in PaddleScience to construct supervised constraints. Before defining constraints, you need to first specify various parameters used for data loading in supervised constraints. The code is as follows:
Among them, the "dataset" field defines the used Dataset class name as RosslerDataset, and also specifies the values of parameters when initializing this class:
file_path: Represents the file path of the training dataset, specified as the value of variable train_file_path;
input_keys: Represents the variable name of model input data, here fill in variable input_keys;
label_keys: Represents the variable name of true label, here fill in variable output_keys;
block_size: Represents how long the time step is used for training, specified as the value of variable train_block_size;
stride: Represents the time step interval between two consecutive training samples, specified as 16;
weight_dict: Represents the weight of the loss function between model output variables and true labels, generated here using output_keys and weights.
The "sampler" field defines the used Sampler class name as BatchSampler, and also specifies that the parameters drop_last and shuffle are both True when initializing this class.
train_dataloader_cfg also defines the values of batch_size and num_workers.
The code for defining supervised constraints is as follows:
The first parameter of SupervisedConstraint is the data loading method, here train_dataloader_cfg defined above is used;
The second parameter is the definition of loss function, here MSELoss with L2Decay is used, class name is MSELossWithL2Decay, regularization_dict sets the variable name and corresponding weight of regularization;
The third parameter indicates how to calculate the intermediate variables that need to be constrained during training. Here, the variable we constrain is the output of the network;
The fourth parameter is the name of the constraint condition, which is convenient for subsequent indexing. Here it is named "Sup".
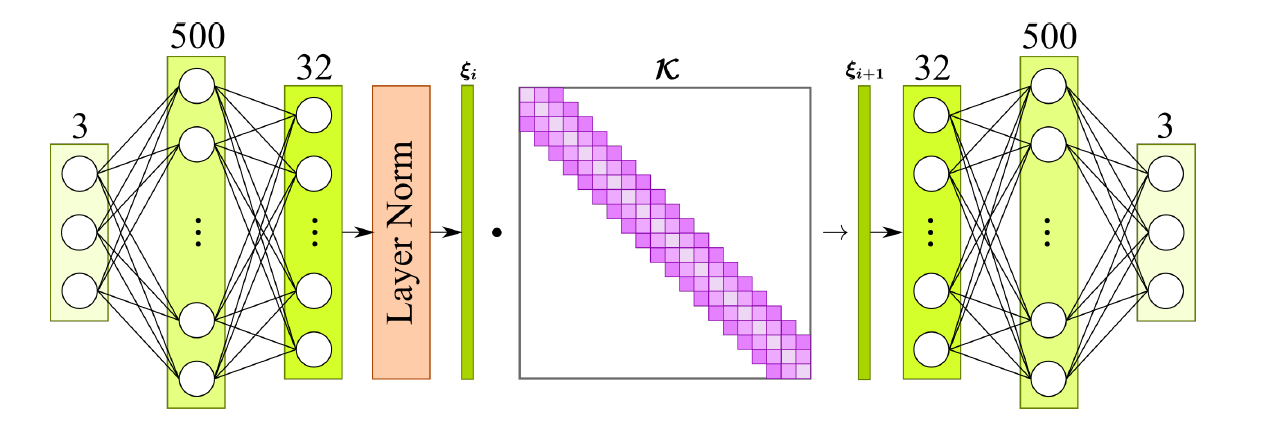
In this case, the input and output of the Embedding model are the position coordinates \((x, y, z)\) of points in physical space. A fully connected layer is used to implement the Embedding model, as shown in the figure below.
Among them, the first two parameters of RosslerEmbedding have been described above and will not be repeated here. The third and fourth parameters of the network model are the mean and variance of the training dataset, which are used to normalize the input data. The code for calculating mean and variance is expressed as follows:
The learning rate method used in this case is ExponentialDecay, and the learning rate size is set to 0.001. The optimizer uses Adam, and gradient clipping uses Paddle's built-in ClipGradByGlobalNorm method. Expressed in PaddleScience code as follows
# init optimizer and lr schedulerclip=paddle.nn.ClipGradByGlobalNorm(clip_norm=0.1)lr_scheduler=ppsci.optimizer.lr_scheduler.ExponentialDecay(iters_per_epoch=ITERS_PER_EPOCH,decay_steps=ITERS_PER_EPOCH,**cfg.TRAIN.lr_scheduler,)()optimizer=ppsci.optimizer.Adam(lr_scheduler,grad_clip=clip,**cfg.TRAIN.optimizer)(model)
During the training process of this case, the training status of the current model will be evaluated using the validation set at certain training round intervals, and SupervisedValidator is needed to construct the validator. The code is as follows:
The SupervisedValidator validator is similar to SupervisedConstraint, the difference is that the validator needs to set the evaluation metric metric, here ppsci.metric.MSE is used.
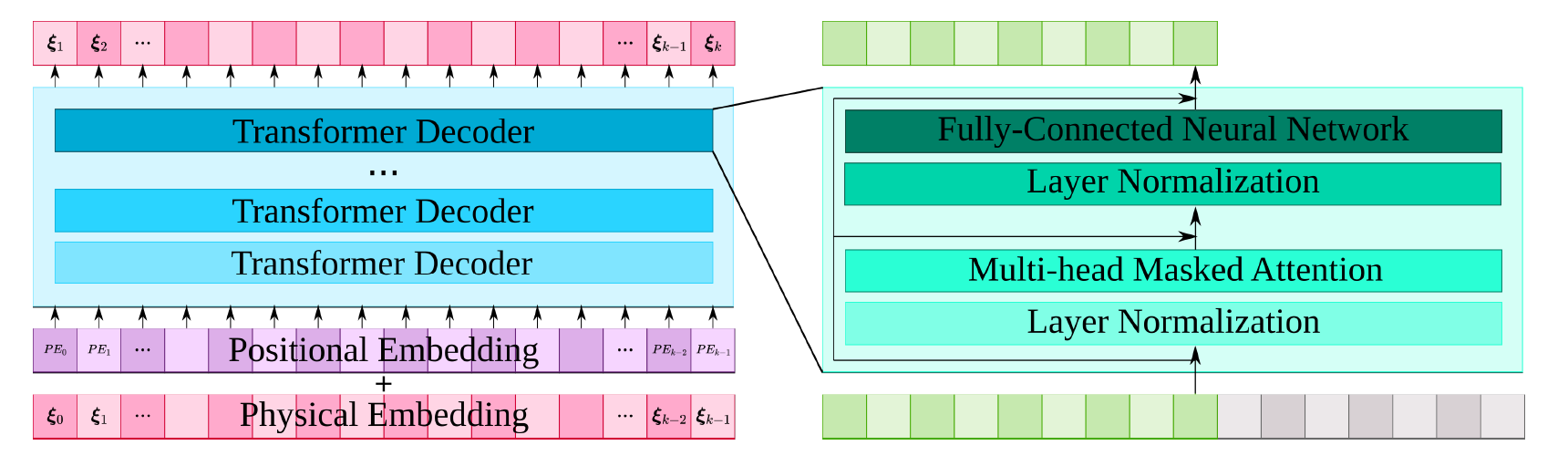
The previous section introduced how to construct the training and evaluation of the Embedding model. In this section, we will introduce how to use the trained Embedding model to train the Transformer model. Because the steps for training the Transformer model are basically similar to the steps for training the Embedding model, the various parameters in the repeated parts of the two are not introduced in detail in this section. First, the various parameter variables defined in the code are shown below, and the specific meaning of each parameter will be explained when used below.
-EVAL.pretrained_model_path-mode-output_dir-log_freq-EMBEDDING_MODEL_PATHsweep:# output directory for multirundir:${hydra.run.dir}subdir:./# general settingsmode:train# running mode: train/eval
The Transformer model also solves problems based on data-driven methods, so it is necessary to use SupervisedConstraint built in PaddleScience to construct supervised constraints. Before defining constraints, you need to first specify various parameters used for data loading in supervised constraints. The code is as follows:
The various parameters for data loading are basically consistent with those in the Embedding model and will not be repeated. It should be noted that since the input data for Transformer model training is the output data of the Encoder module of the Embedding model, we use the trained Embedding model as a parameter of RosslerDataset, and first map the training data to the coding space during initialization.
The code for defining supervised constraints is as follows:
In addition to filling in input_keys and output_keys, the class PhysformerGPT2 also needs to set the number of layers of the Transformer model num_layers, the size of the context num_ctx, the length of the input Embedding vector embed_size, and the parameter of the multi-head attention mechanism num_heads. The values filled in here are 4, 64, 32, 4.
The learning rate method used in this case is CosineWarmRestarts, and the learning rate size is set to 0.001. The optimizer uses Adam, and gradient clipping uses Paddle's built-in ClipGradByGlobalNorm method. Expressed in PaddleScience code as follows:
# init optimizer and lr schedulerclip=paddle.nn.ClipGradByGlobalNorm(clip_norm=0.1)lr_scheduler=ppsci.optimizer.lr_scheduler.CosineWarmRestarts(iters_per_epoch=ITERS_PER_EPOCH,**cfg.TRAIN.lr_scheduler)()optimizer=ppsci.optimizer.Adam(lr_scheduler,grad_clip=clip,**cfg.TRAIN.optimizer)(model)
During the training process, the training status of the current model will be evaluated using the validation set at certain training round intervals, and SupervisedValidator is needed to construct the validator. Expressed in PaddleScience code as follows:
In this case, the visualizer can be constructed to visualize the evaluation results during model evaluation. Since the output data of the Transformer model is the predicted data in the coding space and cannot be directly visualized, it is necessary to additionally transform the output data to the physical state space using the Decoder module of the Embedding network.
In this paper, the code for transforming the output data of the Transformer model to the physical state space is defined first:
It can be seen that the program first loads the trained Embedding model, and then implements the transformation from the encoding vector to the physical state space in the __call__ function of OutputTransform.
After defining the above code, you can implement the construction of the visualizer code:
# set visualizer(optional)states=mse_validator.data_loader.dataset.dataembedding_data=mse_validator.data_loader.dataset.embedding_datavis_data={"embeds":embedding_data[:cfg.VIS_DATA_NUMS,:-1,:],"states":states[:cfg.VIS_DATA_NUMS,1:,:],}visualizer={"visualize_states":ppsci.visualize.VisualizerScatter3D(vis_data,{"pred_states":lambdad:output_transform(d),"states":lambdad:d["states"],},num_timestamps=1,prefix="result_states",)}
First use the dataset in mse_validator above for visualization, and also introduce the vis_data_nums variable to control the number of samples to be visualized. Finally, build the visualizer through VisualizerScatter3D.
3.3.6 Model Training, Evaluation and Visualization¶
After completing the above settings, you only need to pass the instantiated objects to ppsci.solver.Solver, and then start training and evaluation.
# Copyright (c) 2023 PaddlePaddle Authors. All Rights Reserved.## Licensed under the Apache License, Version 2.0 (the "License");# you may not use this file except in compliance with the License.# You may obtain a copy of the License at## http://www.apache.org/licenses/LICENSE-2.0## Unless required by applicable law or agreed to in writing, software# distributed under the License is distributed on an "AS IS" BASIS,# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.# See the License for the specific language governing permissions and# limitations under the License.# Two-stage training# 1. Train a embedding model by running train_enn.py.# 2. Load pretrained embedding model and freeze it, then train a transformer model by running train_transformer.py.# This file is for step1: training a embedding model.# This file is based on PaddleScience/ppsci API.fromosimportpathasospimporthydraimportnumpyasnpimportpaddlefromomegaconfimportDictConfigimportppscifromppsci.utilsimportloggerdefget_mean_std(data:np.ndarray):mean=np.asarray([np.mean(data[:,:,0]),np.mean(data[:,:,1]),np.min(data[:,:,2])]).reshape(1,3)std=np.asarray([np.std(data[:,:,0]),np.std(data[:,:,1]),np.max(data[:,:,2])-np.min(data[:,:,2]),]).reshape(1,3)returnmean,stddeftrain(cfg:DictConfig):# set random seed for reproducibilityppsci.utils.misc.set_random_seed(cfg.seed)# initialize loggerlogger.init_logger("ppsci",osp.join(cfg.output_dir,f"{cfg.mode}.log"),"info")weights=(1.0*(cfg.TRAIN_BLOCK_SIZE-1),1.0e3*cfg.TRAIN_BLOCK_SIZE)regularization_key="k_matrix"# manually build constraint(s)train_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.TRAIN_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.TRAIN_BLOCK_SIZE,"stride":16,"weight_dict":{key:valueforkey,valueinzip(cfg.MODEL.output_keys,weights)},},"sampler":{"name":"BatchSampler","drop_last":True,"shuffle":True,},"batch_size":cfg.TRAIN.batch_size,"num_workers":4,}sup_constraint=ppsci.constraint.SupervisedConstraint(train_dataloader_cfg,ppsci.loss.MSELossWithL2Decay(regularization_dict={regularization_key:1e-1*(cfg.TRAIN_BLOCK_SIZE-1)}),{key:lambdaout,k=key:out[k]forkeyincfg.MODEL.output_keys+(regularization_key,)},name="Sup",)constraint={sup_constraint.name:sup_constraint}# set iters_per_epoch by dataloader lengthITERS_PER_EPOCH=len(sup_constraint.data_loader)# manually init modeldata_mean,data_std=get_mean_std(sup_constraint.data_loader.dataset.data)model=ppsci.arch.RosslerEmbedding(cfg.MODEL.input_keys,cfg.MODEL.output_keys+(regularization_key,),data_mean,data_std,)# init optimizer and lr schedulerclip=paddle.nn.ClipGradByGlobalNorm(clip_norm=0.1)lr_scheduler=ppsci.optimizer.lr_scheduler.ExponentialDecay(iters_per_epoch=ITERS_PER_EPOCH,decay_steps=ITERS_PER_EPOCH,**cfg.TRAIN.lr_scheduler,)()optimizer=ppsci.optimizer.Adam(lr_scheduler,grad_clip=clip,**cfg.TRAIN.optimizer)(model)# manually build validatorweights=(1.0*(cfg.VALID_BLOCK_SIZE-1),1.0e4*cfg.VALID_BLOCK_SIZE)eval_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.VALID_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.VALID_BLOCK_SIZE,"stride":32,"weight_dict":{key:valueforkey,valueinzip(cfg.MODEL.output_keys,weights)},},"sampler":{"name":"BatchSampler","drop_last":False,"shuffle":False,},"batch_size":cfg.EVAL.batch_size,"num_workers":4,}mse_validator=ppsci.validate.SupervisedValidator(eval_dataloader_cfg,ppsci.loss.MSELoss(),metric={"MSE":ppsci.metric.MSE()},name="MSE_Validator",)validator={mse_validator.name:mse_validator}solver=ppsci.solver.Solver(model,constraint,cfg.output_dir,optimizer,lr_scheduler,cfg.TRAIN.epochs,ITERS_PER_EPOCH,eval_during_train=True,validator=validator,)# train modelsolver.train()# evaluate after finished trainingsolver.eval()defevaluate(cfg:DictConfig):# set random seed for reproducibilityppsci.utils.misc.set_random_seed(cfg.seed)# initialize loggerlogger.init_logger("ppsci",osp.join(cfg.output_dir,f"{cfg.mode}.log"),"info")weights=(1.0*(cfg.TRAIN_BLOCK_SIZE-1),1.0e3*cfg.TRAIN_BLOCK_SIZE)regularization_key="k_matrix"# manually build constraint(s)train_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.TRAIN_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.TRAIN_BLOCK_SIZE,"stride":16,"weight_dict":{key:valueforkey,valueinzip(cfg.MODEL.output_keys,weights)},},"sampler":{"name":"BatchSampler","drop_last":True,"shuffle":True,},"batch_size":cfg.TRAIN.batch_size,"num_workers":4,}sup_constraint=ppsci.constraint.SupervisedConstraint(train_dataloader_cfg,ppsci.loss.MSELossWithL2Decay(regularization_dict={regularization_key:1e-1*(cfg.TRAIN_BLOCK_SIZE-1)}),{key:lambdaout,k=key:out[k]forkeyincfg.MODEL.output_keys+(regularization_key,)},name="Sup",)# manually init modeldata_mean,data_std=get_mean_std(sup_constraint.data_loader.dataset.data)model=ppsci.arch.RosslerEmbedding(cfg.MODEL.input_keys,cfg.MODEL.output_keys+(regularization_key,),data_mean,data_std,)# manually build validatorweights=(1.0*(cfg.VALID_BLOCK_SIZE-1),1.0e4*cfg.VALID_BLOCK_SIZE)eval_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.VALID_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.VALID_BLOCK_SIZE,"stride":32,"weight_dict":{key:valueforkey,valueinzip(cfg.MODEL.output_keys,weights)},},"sampler":{"name":"BatchSampler","drop_last":False,"shuffle":False,},"batch_size":cfg.EVAL.batch_size,"num_workers":4,}mse_validator=ppsci.validate.SupervisedValidator(eval_dataloader_cfg,ppsci.loss.MSELoss(),metric={"MSE":ppsci.metric.MSE()},name="MSE_Validator",)validator={mse_validator.name:mse_validator}solver=ppsci.solver.Solver(model,output_dir=cfg.output_dir,validator=validator,pretrained_model_path=cfg.EVAL.pretrained_model_path,)solver.eval()@hydra.main(version_base=None,config_path="./conf",config_name="enn.yaml")defmain(cfg:DictConfig):ifcfg.mode=="train":train(cfg)elifcfg.mode=="eval":evaluate(cfg)else:raiseValueError(f"cfg.mode should in ['train', 'eval'], but got '{cfg.mode}'")if__name__=="__main__":main()
# Copyright (c) 2023 PaddlePaddle Authors. All Rights Reserved.## Licensed under the Apache License, Version 2.0 (the "License");# you may not use this file except in compliance with the License.# You may obtain a copy of the License at## http://www.apache.org/licenses/LICENSE-2.0## Unless required by applicable law or agreed to in writing, software# distributed under the License is distributed on an "AS IS" BASIS,# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.# See the License for the specific language governing permissions and# limitations under the License.# Two-stage training# 1. Train a embedding model by running train_enn.py.# 2. Load pretrained embedding model and freeze it, then train a transformer model by running train_transformer.py.# This file is for step2: training a transformer model, based on frozen pretrained embedding model.# This file is based on PaddleScience/ppsci API.fromosimportpathasospfromtypingimportDictimporthydraimportpaddlefromomegaconfimportDictConfigimportppscifromppsci.archimportbasefromppsci.utilsimportloggerfromppsci.utilsimportsave_loaddefbuild_embedding_model(embedding_model_path:str)->ppsci.arch.RosslerEmbedding:input_keys=("states",)output_keys=("pred_states","recover_states")regularization_key="k_matrix"model=ppsci.arch.RosslerEmbedding(input_keys,output_keys+(regularization_key,))save_load.load_pretrain(model,embedding_model_path)returnmodelclassOutputTransform(object):def__init__(self,model:base.Arch):self.model=modelself.model.eval()def__call__(self,x:Dict[str,paddle.Tensor]):pred_embeds=x["pred_embeds"]pred_states=self.model.decoder(pred_embeds)returnpred_statesdeftrain(cfg:DictConfig):# set random seed for reproducibilityppsci.utils.misc.set_random_seed(cfg.seed)# initialize loggerlogger.init_logger("ppsci",osp.join(cfg.output_dir,f"{cfg.mode}.log"),"info")embedding_model=build_embedding_model(cfg.EMBEDDING_MODEL_PATH)output_transform=OutputTransform(embedding_model)# manually build constraint(s)train_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.TRAIN_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.TRAIN_BLOCK_SIZE,"stride":16,"embedding_model":embedding_model,},"sampler":{"name":"BatchSampler","drop_last":True,"shuffle":True,},"batch_size":cfg.TRAIN.batch_size,"num_workers":4,}sup_constraint=ppsci.constraint.SupervisedConstraint(train_dataloader_cfg,ppsci.loss.MSELoss(),name="Sup",)constraint={sup_constraint.name:sup_constraint}# set iters_per_epoch by dataloader lengthITERS_PER_EPOCH=len(constraint["Sup"].data_loader)# manually init modelmodel=ppsci.arch.PhysformerGPT2(**cfg.MODEL)# init optimizer and lr schedulerclip=paddle.nn.ClipGradByGlobalNorm(clip_norm=0.1)lr_scheduler=ppsci.optimizer.lr_scheduler.CosineWarmRestarts(iters_per_epoch=ITERS_PER_EPOCH,**cfg.TRAIN.lr_scheduler)()optimizer=ppsci.optimizer.Adam(lr_scheduler,grad_clip=clip,**cfg.TRAIN.optimizer)(model)# manually build validatoreval_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.VALID_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.VALID_BLOCK_SIZE,"stride":1024,"embedding_model":embedding_model,},"sampler":{"name":"BatchSampler","drop_last":False,"shuffle":False,},"batch_size":cfg.EVAL.batch_size,"num_workers":4,}mse_validator=ppsci.validate.SupervisedValidator(eval_dataloader_cfg,ppsci.loss.MSELoss(),metric={"MSE":ppsci.metric.MSE()},name="MSE_Validator",)validator={mse_validator.name:mse_validator}# set visualizer(optional)states=mse_validator.data_loader.dataset.dataembedding_data=mse_validator.data_loader.dataset.embedding_datavis_data={"embeds":embedding_data[:cfg.VIS_DATA_NUMS,:-1,:],"states":states[:cfg.VIS_DATA_NUMS,1:,:],}visualizer={"visualize_states":ppsci.visualize.VisualizerScatter3D(vis_data,{"pred_states":lambdad:output_transform(d),"states":lambdad:d["states"],},num_timestamps=1,prefix="result_states",)}solver=ppsci.solver.Solver(model,constraint,cfg.output_dir,optimizer,lr_scheduler,cfg.TRAIN.epochs,ITERS_PER_EPOCH,eval_during_train=cfg.TRAIN.eval_during_train,eval_freq=cfg.TRAIN.eval_freq,validator=validator,visualizer=visualizer,)# train modelsolver.train()# evaluate after finished trainingsolver.eval()# visualize prediction after finished trainingsolver.visualize()defevaluate(cfg:DictConfig):# set random seed for reproducibilityppsci.utils.misc.set_random_seed(cfg.seed)# initialize loggerlogger.init_logger("ppsci",osp.join(cfg.output_dir,f"{cfg.mode}.log"),"info")embedding_model=build_embedding_model(cfg.EMBEDDING_MODEL_PATH)output_transform=OutputTransform(embedding_model)# manually init modelmodel=ppsci.arch.PhysformerGPT2(**cfg.MODEL)# manually build validatoreval_dataloader_cfg={"dataset":{"name":"RosslerDataset","file_path":cfg.VALID_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.VALID_BLOCK_SIZE,"stride":1024,"embedding_model":embedding_model,},"sampler":{"name":"BatchSampler","drop_last":False,"shuffle":False,},"batch_size":cfg.EVAL.batch_size,"num_workers":4,}mse_validator=ppsci.validate.SupervisedValidator(eval_dataloader_cfg,ppsci.loss.MSELoss(),metric={"MSE":ppsci.metric.MSE()},name="MSE_Validator",)validator={mse_validator.name:mse_validator}# set visualizer(optional)states=mse_validator.data_loader.dataset.dataembedding_data=mse_validator.data_loader.dataset.embedding_datavis_datas={"embeds":embedding_data[:cfg.VIS_DATA_NUMS,:-1,:],"states":states[:cfg.VIS_DATA_NUMS,1:,:],}visualizer={"visulzie_states":ppsci.visualize.VisualizerScatter3D(vis_datas,{"pred_states":lambdad:output_transform(d),"states":lambdad:d["states"],},num_timestamps=1,prefix="result_states",)}solver=ppsci.solver.Solver(model,output_dir=cfg.output_dir,validator=validator,visualizer=visualizer,pretrained_model_path=cfg.EVAL.pretrained_model_path,)solver.eval()# visualize prediction for pretrained model(optional)solver.visualize()defexport(cfg:DictConfig):# set modelembedding_model=build_embedding_model(cfg.EMBEDDING_MODEL_PATH)model_cfg={**cfg.MODEL,"embedding_model":embedding_model,"input_keys":["states"],"output_keys":["pred_states"],}model=ppsci.arch.PhysformerGPT2(**model_cfg)# initialize solversolver=ppsci.solver.Solver(model,pretrained_model_path=cfg.INFER.pretrained_model_path,)# export modelfrompaddle.staticimportInputSpecinput_spec=[{key:InputSpec([None,255,3],"float32",name=key)forkeyinmodel.input_keys},]solver.export(input_spec,cfg.INFER.export_path)definference(cfg:DictConfig):fromdeploy.python_inferimportpinn_predictorpredictor=pinn_predictor.PINNPredictor(cfg)dataset_cfg={"name":"RosslerDataset","file_path":cfg.VALID_FILE_PATH,"input_keys":cfg.MODEL.input_keys,"label_keys":cfg.MODEL.output_keys,"block_size":cfg.VALID_BLOCK_SIZE,"stride":1024,}dataset=ppsci.data.dataset.build_dataset(dataset_cfg)input_dict={"states":dataset.data[:cfg.VIS_DATA_NUMS,:-1,:],}output_dict=predictor.predict(input_dict,cfg.INFER.batch_size)# mapping data to cfg.INFER.output_keysoutput_keys=["pred_states"]output_dict={store_key:output_dict[infer_key]forstore_key,infer_keyinzip(output_keys,output_dict.keys())}input_dict={"states":dataset.data[:cfg.VIS_DATA_NUMS,1:,:],}data_dict={**input_dict,**output_dict}foriinrange(cfg.VIS_DATA_NUMS):ppsci.visualize.save_plot_from_3d_dict(f"./rossler_transformer_pred_{i}",{key:value[i]forkey,valueindata_dict.items()},("states","pred_states"),)@hydra.main(version_base=None,config_path="./conf",config_name="transformer.yaml")defmain(cfg:DictConfig):ifcfg.mode=="train":train(cfg)elifcfg.mode=="eval":evaluate(cfg)elifcfg.mode=="export":export(cfg)elifcfg.mode=="infer":inference(cfg)else:raiseValueError(f"cfg.mode should in ['train', 'eval', 'export', 'infer'], but got '{cfg.mode}'")if__name__=="__main__":main()
The figure below shows the model prediction results and traditional numerical differentiation prediction results under two different initial conditions.
Model prediction result ("pred_states") vs traditional numerical differentiation result ("states")
Model prediction result ("pred_states") vs traditional numerical differentiation result ("states")